
Cela ne signifiait-il pas qu’il y avait une sécurité active, pourquoi s’est-il encore écrasé ?

Les mots "sécurité active" ont beaucoup de poids.
Si vous avez acheté une voiture au cours des deux dernières années, vous avez probablement déjà une petite idée de ces quatre mots, ou vous avez peut-être appris des vantardises du vendeur :
Notre voiture peut freiner automatiquement en cas de danger !
Quelle belle technologie. Désormais, vous n'avez plus à vous soucier de la conduite, et vous n'avez plus à vous soucier des "sondes fantômes" qui apparaissent soudainement sur la route. Les accidents de la circulation seront également considérablement réduits. .
Dans cet esprit, vous avez acheté la voiture avec satisfaction.

Mais le fait est que dans plusieurs accidents de la circulation graves récents qui ont beaucoup attiré l'attention, les véhicules impliqués sont tous équipés d'une technologie de sécurité active. La cause de l'accident reste à étudier, mais on estime que de nombreuses personnes ont une question en tête : pourquoi la technologie de sécurité active qui est généralement vigoureusement promue n'est-elle pas utile aux moments critiques ?
De combien d'étapes avez-vous besoin pour arrêter la voiture pour vous ?
Pour être précis, la technologie de "freinage automatique en cas de danger" s'appelle AEB (Autonomous Emergency Braking), qui fait partie de la sécurité active et la plus importante pour de nombreuses personnes.
En 1996, Mercedes-Benz a équipé ses Classe S et Classe SL d'un système d'assistance au freinage appelé BAS.

▲Classe S W140
Contrairement à l'AEB que nous comprenons aujourd'hui, ce système n'applique pas les freins "automatiquement", mais confirme les intentions du conducteur en détectant la vitesse à laquelle le conducteur appuie sur la pédale de frein. Si le système juge qu'il s'agit d'une urgence, la force de freinage sera être augmenté automatiquement au maximum.
Humainement, il s'agit de vous aider à appuyer sur les freins jusqu'au bout lorsque vous êtes pressé d'appuyer sur les freins mais pas assez décisif. Cependant, cette fonction n'applique pas automatiquement les freins sans que le conducteur actionne les freins.
En 2008, Volvo a introduit le système original City Safety, le premier système de freinage d'urgence automatique AEB conforme à nos connaissances actuelles.
Ce système émettra un avertissement à l'avance lorsqu'il détectera un danger (c'est-à-dire la fonction d'avertissement de collision avant FCW), et si le conducteur ne répond pas et continue d'avancer, le véhicule effectuera un freinage d'urgence pour éviter une collision. Cette logique n'est pas différente des conditions de travail actuelles de l'AEB.

AEB a également apporté quelques améliorations en cours de route.
Limitée par les capacités matérielles, la plage de travail des premiers AEB était très limitée. La plupart des premiers AEB ne pouvaient fonctionner que dans la plage de vitesse de 4 à 30 km/h et étaient sujets à des détections manquées ou erronées. Ce n'est clairement pas suffisant.
Avec les progrès communs des algorithmes, des radars à ondes millimétriques et des caméras de véhicule, la plupart des AEB d'aujourd'hui peuvent porter des jugements et prendre des mesures de freinage à des vitesses de 60 km/h ou même de 80 km/h, et la portée de détection et la précision ont également été considérablement améliorées.
Lorsque les conditions le permettent, certains AEB peuvent également relâcher les freins après avoir décéléré à une vitesse de sécurité, permettant au véhicule de glisser vers l'avant au lieu de freiner directement. Cela permet non seulement aux passagers de la voiture de ressentir moins d'impact, mais évite également les collisions par l'arrière des voitures derrière.
Dans l'environnement général du Lidar sur la voiture, le Lidar embarqué orienté vers l'avant avec une pénétration plus forte et une plage de détection plus longue vaut naturellement la peine d'être utilisé à bon escient.
Par exemple, Ideal a récemment intégré le lidar dans le système AEB pour augmenter encore la distance de jugement du véhicule, et en même temps faire face à des conditions de travail difficiles à juger par des caméras visuelles telles qu'une lumière insuffisante.
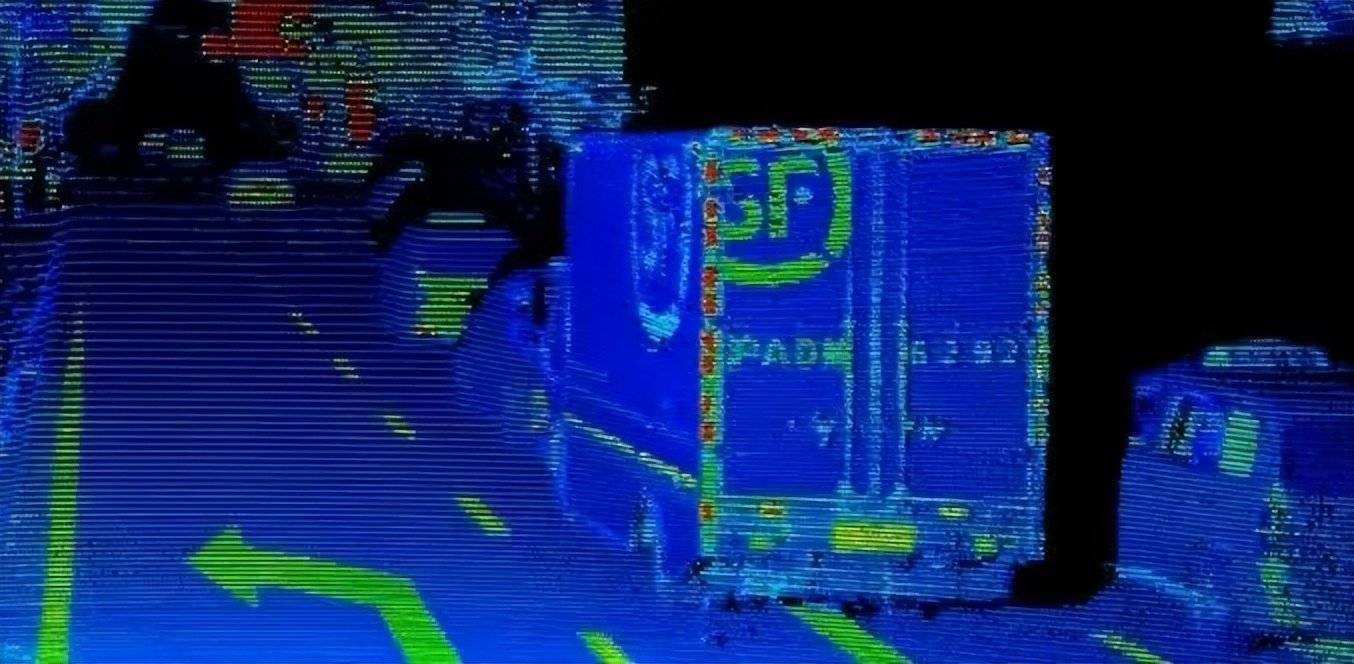
▲Le monde vu après la fusion du lidar
Il est prévisible que de plus en plus de constructeurs automobiles utiliseront le lidar ou d'autres systèmes de perception pour améliorer les capacités de l'AEB. Il y a encore beaucoup de place pour l'amélioration de la précision du jugement et de la limite de vitesse de l'AEB à l'avenir. Et tout cela pour vous aider à freiner au bon moment et à éviter les accidents .
Ça sonne si bien, pourquoi suis-je encore tombé dessus ?
Cependant, tout a peur d'un mais.
- La conduite assistée est très forte, mais elle est actuellement au niveau L2, et le conducteur est responsable de tout accident ;
- Une garantie à vie c'est bien, mais seulement pour le premier propriétaire ;
- L'AEB est bon, mais il a toujours la possibilité d'une fausse détection, d'une détection manquée et d'un échec de démarrage.
Tout d'abord, presque tous les AEB ont une vitesse d'activation minimale, telle que 4 km/h ou 8 km/h, afin d'éviter un faux déclenchement dans des scénarios tels que le déplacement d'une voiture à basse vitesse, ce qui signifie qu'éviter les rayures à basse vitesse n'appartient pas dans le cadre de l'AEB.
Même dans la plage de travail, le déclenchement de l'AEB sera soumis à diverses restrictions.
Tant que vous avez conduit une voiture sur une route au trafic relativement dense et à la gestion lâche, vous avez probablement été effrayé par les "sondes fantômes". Ces piétons/vélos qui sortent de l'ombre ou des endroits couverts peuvent toujours choquer les gens. .

Pour l'AEB, c'est aussi difficile. L'algorithme ne peut pas percevoir à l'avance l'existence de piétons, il est donc difficile de prévoir et même de freiner. Même s'il est perçu, le temps qu'il reste pour freiner peut ne pas être suffisant. Comme dit le proverbe " Les immortels ne peuvent pas être sauvés."
De plus, l'AEB est également affecté la nuit et dans des conditions de faible visibilité telles que les intempéries.

Cependant, la situation de "vu mais pas déclenché" est plus compliquée que ce genre de situation où il n'est pas déclenché parce qu'il n'est "pas vu".
Dans de nombreux tests AEB, nous avons vu divers cas de freinage réussi. Mais de nombreux tests ont un point commun, c'est que les scènes sont "très standard".
Dans l'immense scène, il n'y a que des fausses voitures cibles ou des mannequins de test. Mais vous savez aussi que des conditions routières aussi confortables sont rarement rencontrées en conduite urbaine.
Cependant, les objets sur la route ne sont souvent pas si conventionnels, comme les cônes, les barrages routiers, les objets tombés du véhicule qui précède, ou encore une voiture couchée sur la route, ou une voiture renversée sur la route… Ces objets stationnaires ou anormaux sont très importants pour la route.AEB n'est pas un petit problème.

Afin d'éviter les faux déclenchements, les objets statiques peuvent être ignorés par AEB. Après tout, si des objets statiques tels que des murs, des accotements de route, des arbres de rue, etc. sont identifiés comme des dangers potentiels et freinés, la voiture n'a vraiment pas besoin d'être conduite.
Cependant, lorsqu'il rencontre un obstacle proche d'un objet statique tel qu'un mur, l'AEB peut également le reconnaître comme un mur et fermer les yeux sur le danger réel, provoquant une situation dangereuse.
De plus, pour l'AEB avec un algorithme de vision comme noyau, il est difficile de réagir lorsqu'il rencontre des objets indéfinis, et encore moins d'effectuer des opérations de freinage.
Lorsque la situation de circulation est plus complexe et que les obstacles sont nombreux, l'AEB sera également « ébloui » et incapable de porter un jugement correct. En tant que fonction d'urgence, à moins qu'il n'y ait suffisamment d'informations pour confirmer, AEB adhère au principe de "non-intervention non nécessaire", et naturellement il ne répondra pas.
Au final, l'AEB est la dernière carte pour prévenir les accidents . Cependant, il n'y a généralement aucun moyen de jouer les cartes fermées.Dans le cas d'une bonne main, il vaut mieux ne pas utiliser les cartes fermées.
La vision et la réalité des constructeurs automobiles
En fait, si vous recherchez des mots-clés tels que "freinage actif" et "évitement d'urgence" sur des sites vidéo, vous pourrez certainement voir le "fonctionnement divin" de nombreux véhicules dans des situations dangereuses. éviter le danger, mais chaque fois que vous réussissez, cela signifie beaucoup.

En plus de l'AEB, une série de fonctions de sécurité active telles que la direction d'urgence automatique et le système de maintien de voie protègent également votre sécurité de plusieurs façons.
On peut dire que la bénédiction de la sécurité active a sauvé de nombreux propriétaires de voitures de problèmes majeurs.
La fin de la sécurité active est le taux d'accidents extrêmement bas et la conduite automatique, qui est également le grand projet tracé par de nombreux constructeurs automobiles pour les consommateurs.
Cependant, la réalité est qu'à l'heure actuelle, aussi avancées que soient les fonctions concernées et la finesse de la précision, la capacité de sécurité active a toujours ses limites : tant que la "situation idéale" est dépassée, le système peut échouer à à tout moment.
Cela impactera la confiance de nombreux utilisateurs dans la sécurité active et même dans la conduite assistée.Après tout, "Quand on achète une voiture, ça sonne bien, mais il s'avère qu'elle n'est pas fiable ?"
Pour les constructeurs automobiles, la situation est encore plus embarrassante. Après tout, même dans une situation idéale, il n'y a aucune garantie à 100 % que le système n'aura pas de fausses détections, sans compter qu'il y a encore de nombreux usagers de la route sans scrupules sur la route qui brûlent les feux rouges et se déchaînent aux intersections.
N'oubliez pas qu'après le passage de la conduite assistée de L2 à L3, le responsable de l'accident de conduite assistée passera du conducteur à l'entreprise automobile. Avant d'améliorer encore la capacité de sécurité active, peu de constructeurs automobiles osent vraiment ouvrir la conduite autonome L3. (La conduite autonome Mercedes-Benz L3 a des conditions très difficiles : autoroute fermée + limitation de vitesse à 60 km/h)

Pour le dire crûment, à condition que les capacités de sécurité active du véhicule et les conditions de circulation routière ne remplissent pas les conditions de "laisser la voiture se conduire toute seule", la co-conduite homme-machine avec le conducteur comme noyau reste le choix le plus pratique maintenant.
Après tout, la réaction d'une machine peut être plus rapide que celle d'un humain, mais vous seul avez l'expérience de juger qu'il y a un "petit eDonkey" qui saute d'une petite fourche.
#Bienvenue pour prêter attention au compte public WeChat officiel d'Aifaner : Aifaner (WeChat ID : ifanr), un contenu plus excitant vous sera présenté dès que possible.
Ai Faner | Lien d'origine · Voir les commentaires · Sina Weibo